Robotic Hand Designed to Move Coral
Source: CSIRO
A world-first soft robotic ‘hand’, developed by researchers at CSIRO, Australia’s national science agency, could transform the delicate, labour-intensive process of cultivating baby corals in laboratories, offering a new approach to coral restoration efforts.
The robotic hand, or gripper, was designed to be attached to a coral farming robot called Coral Husbandry Automated Raceway Machine (CHARM).
CHARM and the Beyond Coral Foundation aim to deploy this technology in aquariums and coral farms worldwide, enabling the large-scale production of coral to restore reefs.
Dr Josh Pinskier, CSIRO Soft Robotics Scientist in CSIRO’s Data61, said the project aims to partially automate the time-consuming process of coral propagation.
“Each coral must be carefully transferred between tanks to maintain ideal growing conditions, a process currently managed entirely by hand.
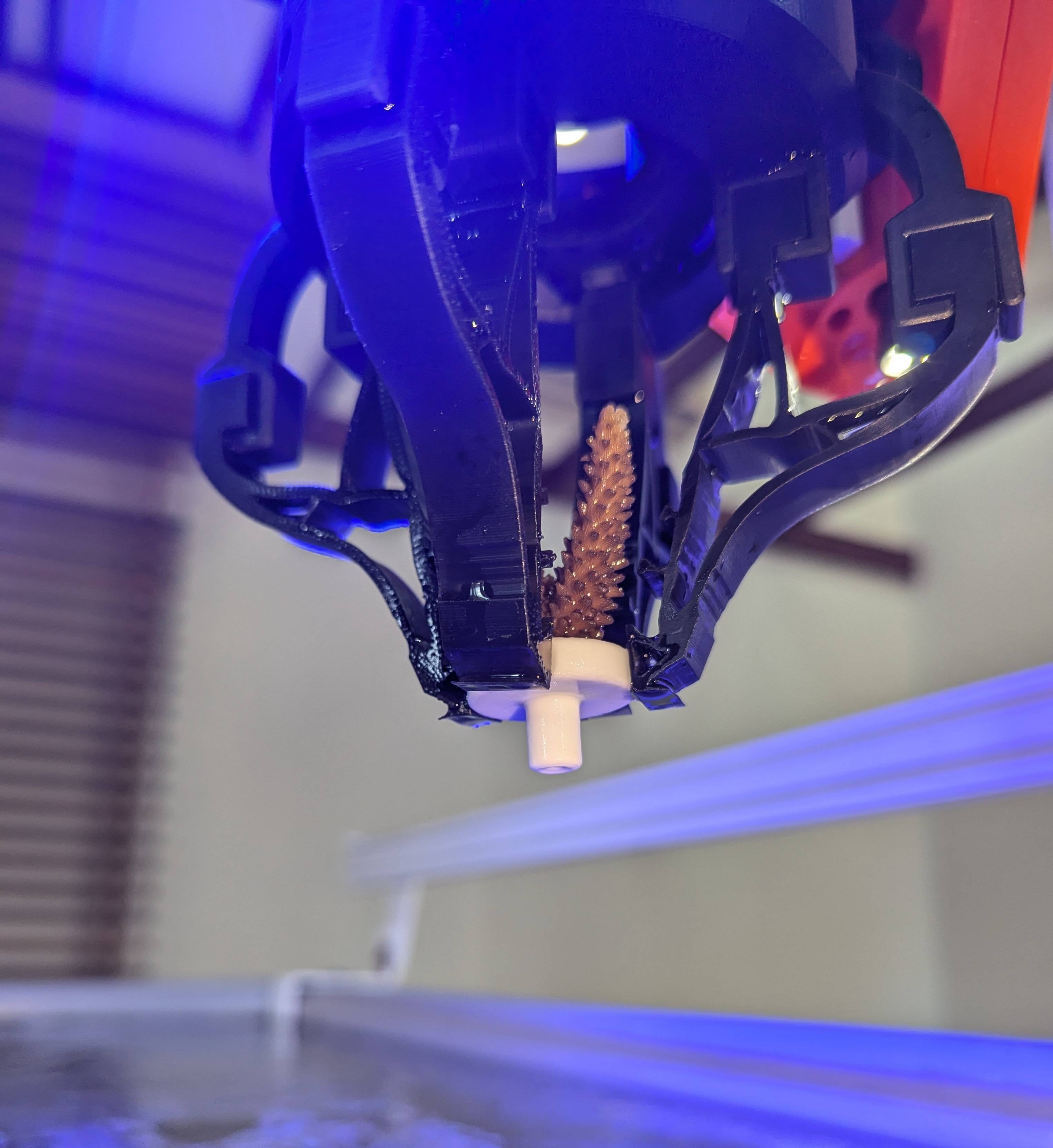
“This gripper replicates the dexterity of a human hand, allowing it to handle delicate coral tissue without damaging them, while being strong enough to lift various sizes.”
The grippers were designed using CSIRO’s AI-powered generative design algorithms which identified the optimal structures to safely and effectively handle delicate coral.
Sarah Baldwin, a Mechatronics Engineer who conducted this research while at CSIRO, said the gripper design was innovative due to traditional robotics' unsuitability in corrosive saltwater.
“To overcome corrosion, we 3D printed the gripper from hard polymer and soft rubber, with only a few screws and bolts,” Baldwin said.
Stephen Rodan, inventor of CHARM and President of Beyond Coral Foundation, said: “This is the first time in history that a robot apparatus ever picked up a coral and transferred it safely between tanks using a soft robotic gripper of this kind.”
The gripper is just one of several attachments CHARM can support, alongside tools such as a soft brush for removing algae, further streamlining coral farming operations.
“The next challenge is placing the corals back in their natural habitat, and a well-designed gripper could facilitate the transition from growth to deployment,” Rodan said.