Case Study: M900-90 2D Multibeam Imaging Sonar




-
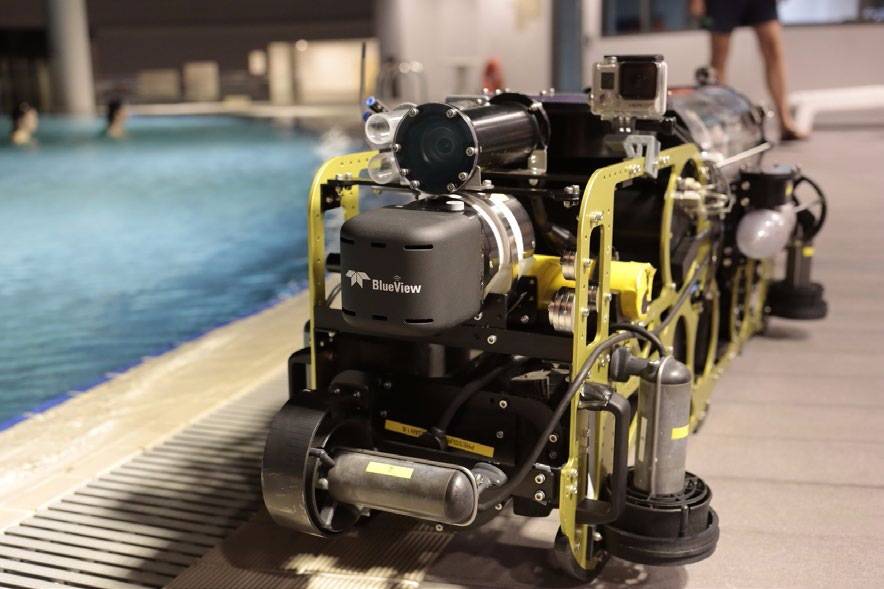
 Bumblebee AUV with BlueView Sonar (Photo: BlueView)
Bumblebee AUV with BlueView Sonar (Photo: BlueView)
-
 NUS’ Bumblebee Autonomous Underwater Vehicle Team (Photo: BlueView)
NUS’ Bumblebee Autonomous Underwater Vehicle Team (Photo: BlueView)
-
 Bumblebee AUV with BlueView Sonar (Photo: BlueView)
Bumblebee AUV with BlueView Sonar (Photo: BlueView)
-
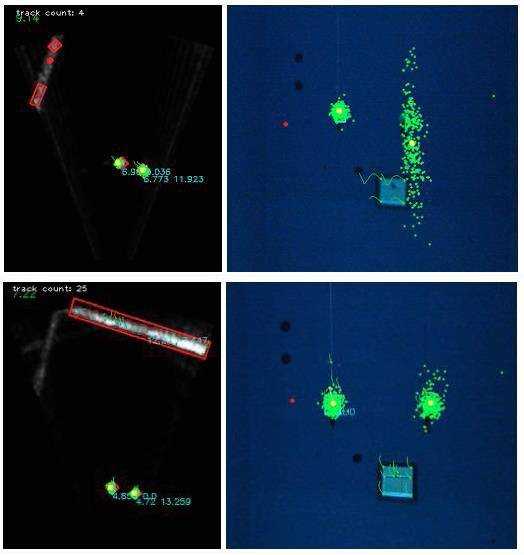
 (Image: BlueView)
(Image: BlueView)


2D imaging sonar selected by National University of Singapore’s Bumblebee AUV Robotics Team
Product: M900-90 2D multibeam imaging sonar
Application: ROV build project
Project: Singapore Autonomous Underwater Vehicle Challenge
Organization: National University of Singapore’s (NUS) Bumblebee Autonomous Underwater Vehicle Team (BBAUV) Robotics Team
Date: 2016
Location: Singapore
Teledyne BlueView supported National University of Singapore’s (NUS) Bunblebee Autonomous Underwater Vehcile (BBAUV) team with the M900-90 multibeam imaging sonar. BBAUV designs and builds water based autonomous vehicles for competition and research purposes, and to help bolster student interest in engineering, since its founding in 2012.
BBAUV has been taking part in the Singapore Autonomous Underwater Vehicle Challenge (SAUVC) and ONR’s International RoboSub Competition held in San Diego, and plans to take part in RobotX this year to be held in Hawaii. BBAUV managed to clinch 2nd place amongst forty international teams at RoboSub 2015, largely, in part, due to the P450-E imaging sonar used last year.
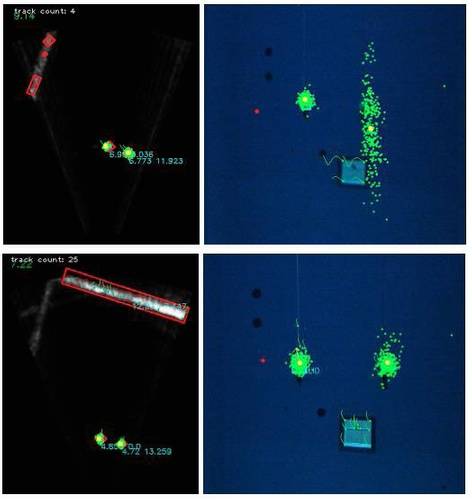
This year, BBAUV has designed and developed a new vehicle, the Bumblebee 3.0, and one of the main enhancements is the addition of the new M900 imaging sonar. This will double the field of view (FOV) and the range and azimuth resolutions, and its compact form factor will allow the vehicle to be more streamlined. Our sonar imagery is fused together with camera imagery from a Guppy Pro camera. This is done by using a particle fitter based track before detect approach, and precise calibration, allowing Bumblebee to localize multiple objects in the water in 3D space with immense accuracy. The M900 will provide even better results for our algorithms.














