Kraken Debuts New Sonar Platform KATFISH


-
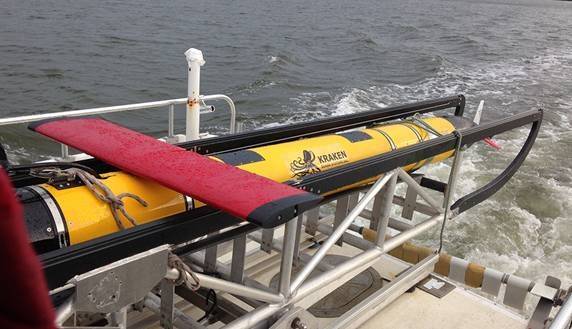 KATFISH system undergoing proof of concept sea trials using Synthetic Aperture Sonar (Photo: Kraken)
KATFISH system undergoing proof of concept sea trials using Synthetic Aperture Sonar (Photo: Kraken)
-
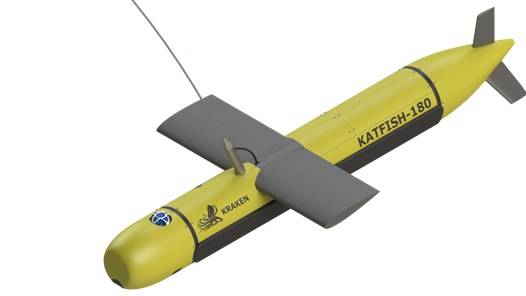
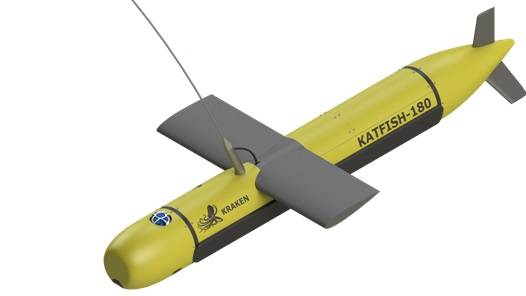 A Rendering of the Kraken Active Towfish, KATFISH-180, including the 180 cm sonar array (Image: Kraken)
A Rendering of the Kraken Active Towfish, KATFISH-180, including the 180 cm sonar array (Image: Kraken)

Kraken Sonar Inc. announced the development of KATFISH (Kraken Active Tow FISH), a sonar platform for military and commercial applications. KATFISH is a key development objective in delivering on the company’s “sensor-to-systems” strategy.
Kraken said the primary objective of the KATFISH project is to develop an actively controlled, intelligent towfish as a platform for real-time ultra-high resolution seabed mapping system, based on the company’s Miniature Interferometric Synthetic Aperture Sonar (MINSAS) technology and Real-Time SAS Processing algorithms.
The KATFISH system is comprised of an actively controlled smart towfish, winch and handling subsystem and operator console. The winch and handling subsystem provides the capability to launch, tow, recover and stow the tow fish. The entire system is designed to be quickly installed and removed from craft of opportunity platforms and is packaged for easy transportation.
While conventional side scan systems are limited in that they only provide high resolution imagery at short range, KATFISH produces ultra-high resolution seabed imagery with constant resolution to full range, Kraken said. The additional information provided by KATFISH delivers a detection and classification capability that cannot be achieved with a conventional sidescan sonar.
KATFISH also generates highly accurate bathymetry data that’s co-registered and geo-referenced to the same pixel grid coordinates as the imagery. Operators can produce crisp seabed imagery and detailed 3D digital terrain maps of seafloor topography that exceed IHO SP-44 survey standards.
The capability of generating centimeter-scale resolution in 3D also provides significant performance improvements in the detection, classification and identification of small seabed objects.
The KATFISH system also implements a SAS gap filler transmitter that produces high resolution data in the nadir region. The system uses two rows of identical receiver elements to deliver bathymetry. An additional lower frequency transmit element, unique to KATFISH, provides a SAS resolution gap fill directly under the platform.
Sonar data is transferred from the transceiver to the processing unit via a Gigabit Ethernet network interface. The sonar operation is controlled from a graphical user interface (GUI) on a notebook computer. The operator sets the sonar parameters in the sonar control window, while depth, imagery and other sensor data are captured and displayed by Kraken’s INSIGHT application software.
According to the developer, KATFISH sonar is based upon a robust and proven design and is suited for a variety of underwater imaging missions. It’s the latest embodiment of Kraken’s sonar imaging expertise that enables a sophisticated system that can generate and process seabed imagery and 3D digital models of the seabed at blindingly fast speeds with uncompromised precision and ultra-high resolution.
KATFISH is currently under development and has successfully completed proof-of-concept sea trials. The system is now being commercialized with a series of technical milestones planned for 2015. Commercial availability is scheduled for 1Q 2016. Budgetary pricing for a complete turn-key system is expected to be in the range of $1.5 million.
Autonomous Underwater Vehicles (AUVs) are ideal sonar platforms, and provide extremely stable platform for acoustic and optical imaging in a variety of water depths. However, for the purposes of seabed survey, AUVs present a number of challenges. AUVs are often speed limited to 3 - 4 knots, which limits the effective area coverage rate (ACR) they can achieve, particularly in shallow water where water depth prevents the high altitudes required for high sonar swath coverage.
Typically powered from rechargeable batteries, most AUVs have limited endurance of less than 24 hours, and must be recovered and recharged in between mission operations. Also, due to the limited bandwidth available from acoustic modems, real-time full resolution sensor data from the AUV is not available and operators must wait until the AUV is recovered in order to process the complete dataset. In the context of commercial survey operations (such as pipeline survey), this severely limits the operational benefits of the AUV, and may not fit well into the workflow for commercial survey. Access to full-resolution, real-time data, such as that collected by Kraken Sonar’s KATFISH, is also a critical requirement for military mine warfare applications, where a trend is now being observed moving towards high-speed Unmanned Surface Vessels (USVs) for fast transit into and out of operational areas.
Towed sonar systems have the benefit of providing full resolution sonar data to the sonar operators onboard the surface vessel in real-time, which is a critical feature for search and survey operations requiring earliest possible prosecution of seabed targets. Onboard real time processing of sonar data also enables real-time online quality monitoring of sonar data.
Passive towfish are the standard for shallow water towed sonar surveys, however passive towfish have a number of limitations. The depth (or altitude) of a passive towfish is achieved by controlling the amount of cable payout and the speed of the surface vessel. A passive towfish does not have any active control surfaces or intelligent control system, therefore cannot actively control its attitude, heading, depth or altitude. The lack of active control means that passive towfish is therefore unable to compensate for any motion disturbances introduced by the surface ship, as a result of ship motion or environmental conditions such as sea state. This can yield poor quality data and resultant lower ACR.
According to Kraken, actively controlled towfish, such as Kraken Sonar’s KATFISH, provide a superior platform for seabed survey, particularly when using synthetic aperture sonar. An actively controlled towfish can compensate for input disturbances, improving the platform stability and the overall image quality. In addition, intelligently controlled active towfish can control their depth and altitude using intelligent bottom following and bottom avoidance routines.