New Docking Head for Schmidt’s ROV SuBastian
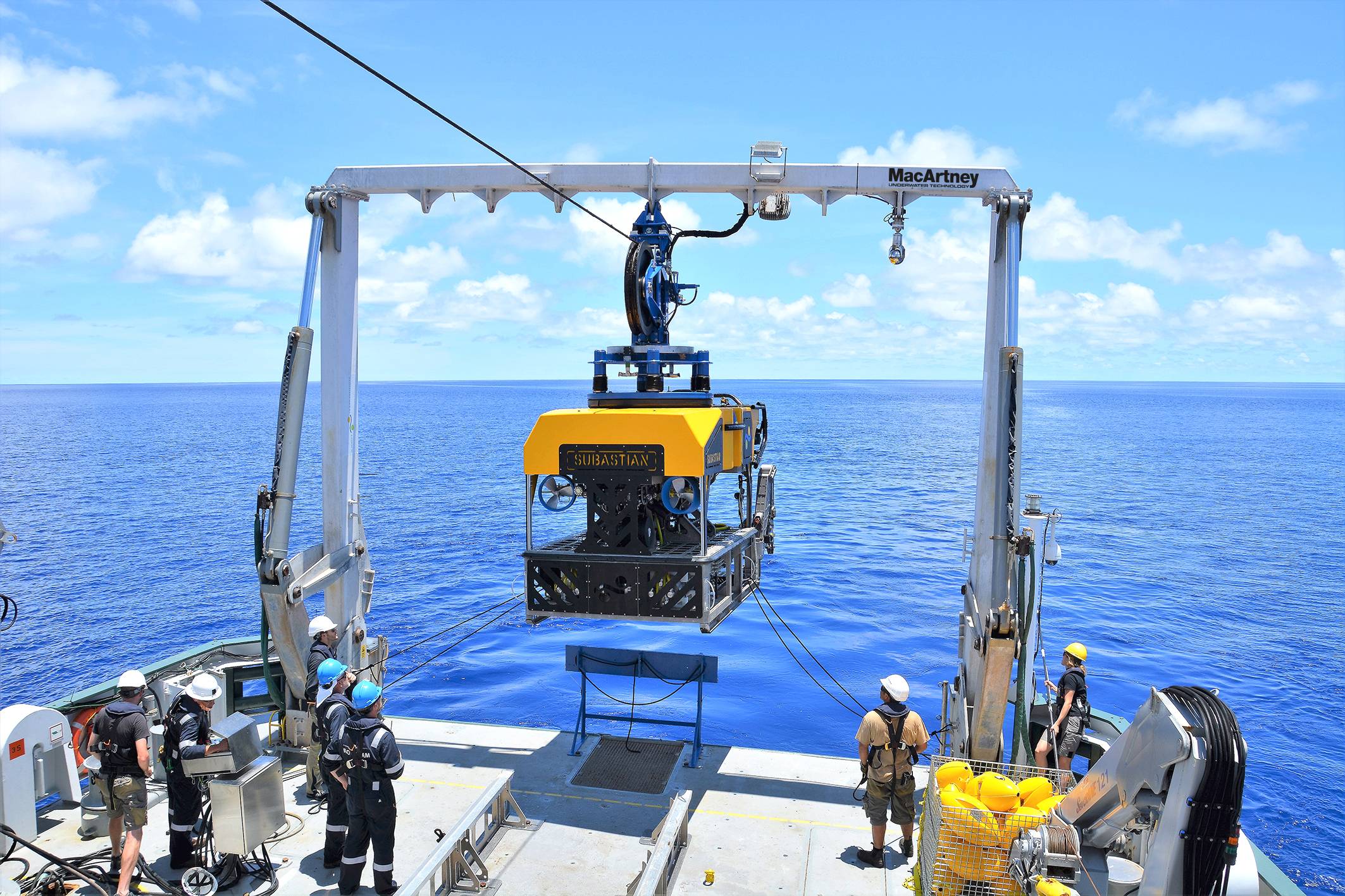
Photo: MacArtney
Schmidt Ocean Institute has chosen a MacArtney docking head to ensure optimum handling of its remotely operated vehicle (ROV) SuBastian on board the R/V Falkor.
The R/V Falkor is now studying the sea surface microlayer and air-sea boundary making its way from Darwin, Australia to Guam. Once in Guam, Falkor will embark on its first science cruise with ROV SuBastian, searching for life in the Mariana Backarc. ROV SuBastian is a new underwater robotic vehicle equipped with a modular frame to provide scientists with a flexible vehicle for ocean exploration.
The MacArtney MERMAC D docking head for Schmidt Ocean Institute ROV SuBastian has been designed featuring a special property, viz. one single suspension point. In consequence, its design and functionality ensure safe launch and recovery of the ROV system as well as stability and steadiness in heavy seas with no unexpected movement of the systems.
The docking head is fitted with a sheave being capable of translating position within its plane or rotation so as to alter the placement of its axis of rotation. This allows the docking head to safely accommodate trouble-free passage.
Recent testing and integration in the open ocean of the ROV SuBastian from aboard its 272 foot oceanographic research vessel Falkor turned out very satisfactorily placing SuBastian in real-world conditions, demonstrating its functionality as a modern research tool with innovative systems.
MacArtney has supplied more products to Schmidt Ocean Institute and the R/V Falkor in addition to the MERMC D docking head for handling the ROV SuBastian, among them a MERMAC R30 AHC winch as well as an A-frame. The MacArtney products made optimal performances and are integral pieces of the successful ROV operation carried out during the sea acceptance trials.